
Partes de un Robot
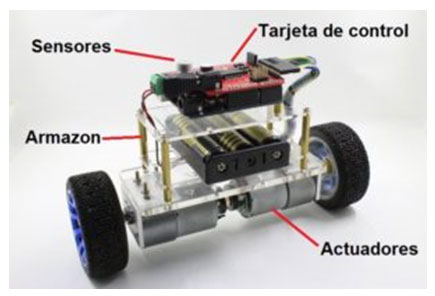
La Robótica es una rama de las ingenierías mecánica, eléctrica, electrónica, biomédica y de las ciencias de la computación, que se ocupa del diseño, construcción, programación y aplicación de los robots. Un robot es un sistema mecánico autónomo que posee inteligencia artificial. Está compuesto de estructura mecánica, batería, placa controladora, sensores y actuadores.
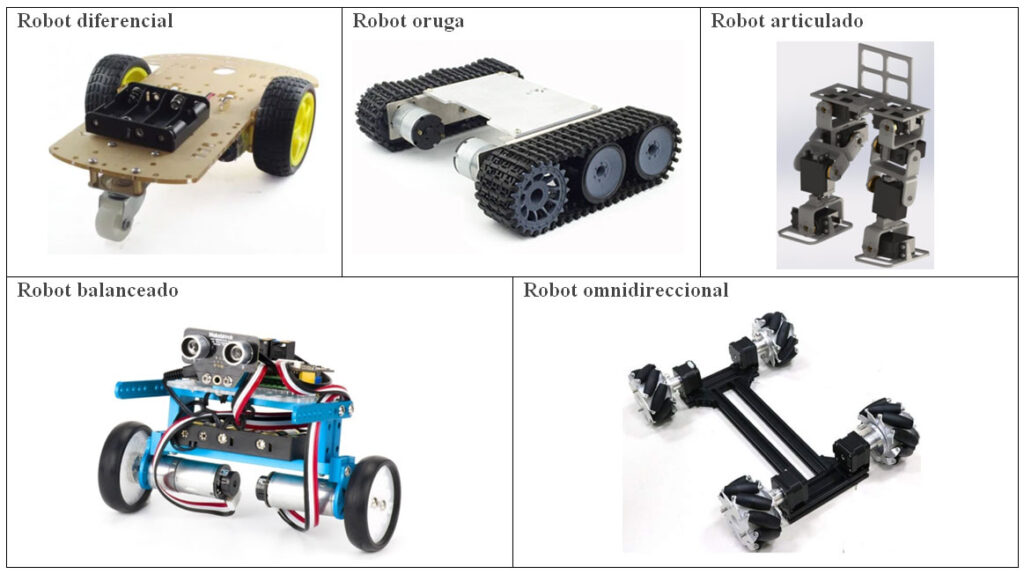
1.- Armazón (esqueleto o chasis del robot)
El armazón es como el esqueleto de un ser humano. Es la parte que soporta los componentes que integran el robot. Se caracteriza por su robustez, tipo de material, facilidad de adaptación y clase de trabajo a desempeñar. Hay diferentes tipos de chasis:
2.- Sensores (dispositivos de entrada)
Un robot debe interactuar con el entorno. Para ello se eligen los sensores adecuados a la tarea a realizar y se sitúan de manera estratégica sobre la estructura. Los sensores más empleados en Robótica Educativa son:
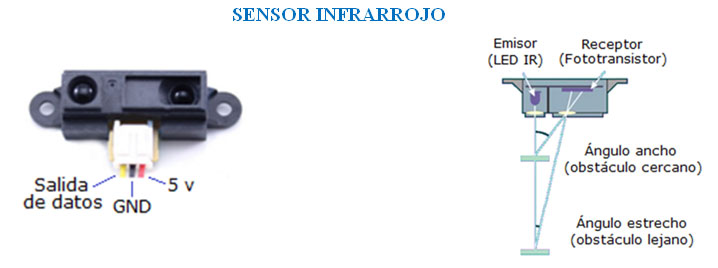
Sensor infrarrojo.
Mide distancia, basado en un sistema de emisión/recepción de radiación en el espectro de los infrarrojos (menor que las ondas de radio y mayor que la luz). También sirve para seguir líneas.
Sensor de contacto
Se basa en la utilización de pulsadores NA con los que detectar obstáculos cercanos o finales de carrera.

Sensor de ultrasonido.
Son muy frecuentes en los robots móviles para cualquier tipo de medio (aire, agua), y sirven para detectar objetos y medir distancias. Se utilizan para construir mapas del entorno y evitar obstáculos.

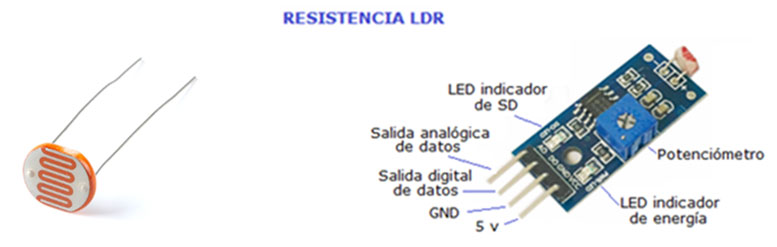
Sensor de luz LDR
Emplea LDRs, que son resistencias dependientes de la luz. A mayor luminosidad menor resistencia, y viceversa. Nos permiten guiar robots según la iluminación ambiente.
3.- Actuadores (dispositivos de salida)
El robot capta y procesa los datos del entorno, para reaccionar en función de la información recibida. Estas acciones, directas o inducidas, se llevan a cabo mediante el uso de actuadores. Los más empleados son los motores (servomotores, servomotores RC, motores paso a paso, motores RC, rotores para drones…). También son actuadores la bombilla, el LED, las tiras LED, las matrices LED, el zumbador (activo o pasivo)…

4.- Tarjeta de control (cerebro del robot)
Debe existir una coordinación entre las distintas partes del robot, para que las acciones respondan correctamente a los estímulos externos según una lógica de control. Ésta es la función de una tarjeta de control o placa controladora (Crumble, Arduino, EV3 de LEGO…). Se trata de sistemas basados en microcontroladores, que programados de manera conveniente resuelven de forma óptima los objetivos de una aplicación.
Las controladoras son el cerebro del robot. Se encargan de reconocer la información que viene del exterior a través de los sensores y hacer funcionar los actuadores conforme al programa almacenado en su memoria. Las controladoras son dispositivos de entrada/salida, para facilitar la interacción con el entorno. Disponen de conexiones para entradas y salidas, que pueden ser analógicas (muchos estados) y digitales (dos estados).

Enlaces para simulación robótica
Etoys es un entorno programable con licencia MIT y gestionado por la Fundación Squeakland. Adecuado para Educación Primaria y Secundaria. La última versión es Etoys 5, es software gratuito y requiere instalación. Ver tutorial en este enlace.
Open Roberta Lab es un entorno programable multiplataforma, gestionado por la Sociedad Fraunhofer de Alemania. Adecuado para Secundaria. Se trabaja en línea, requiere registro del usuario, es software gratuito y permite guardar los programas de las simulaciones con diferentes robots. En este enlace se facilita la información necesaria para conseguir que la simulación con Roberta se traslade al robot físico Lego Mindstorms EV3.
También incluyo un Simulador de Brazo Robótico. Es gratuito y requiere instalación en el ordenador. Trabaja a 32 bits, pero puedes conseguir que funcione a 64 bits. Para ello debes hacer clic derecho sobre el acceso directo y seleccionar Ejecutar con procesador gráfico/Procesador NVIDIA de alto rendimiento.

Paisaje de aprendizaje
Domingo Sánchez
Ingeniero Industrial
Máster en Sistemas Inteligentes
Experto Universitario en Robótica, Programación e Impresión 3D